Hay algo que no enseñan los libros de texto y las autoescuelas: lo que supone conducir de verdad en carreteras y ciudades en las que los vehículos guiados por otras personas no se comportan todos por igual, de forma predecible. Es todo un reto no sólo para los nuevos conductores, sino que también para los sistemas de asistencia a la conducción. Muchos expertos investigan en este campo, incluyendo el conocido Laboratorio de Inteligencia Artificial del M.I.T. (Instituto de Tecnología de Massachusetts, EEUU) que ha tenido la idea de añadir herramientas de análisis psicológico en los sistemas de control de los vehículos para mejorar su efectividad.
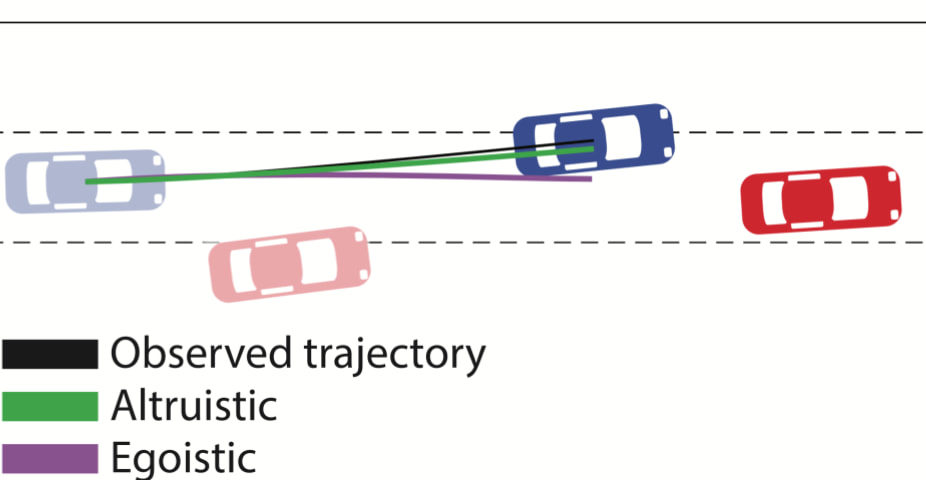
Esta idea comienza con una clasificación de los conductores según su comportamiento, algo que las personas hacemos casi por instinto. Es lo que nos permite, cuando vamos al volante, calificar al vehículo de la izquierda como «agresivo», al gris como «tranquilo» o al de la furgoneta como «novato». Los algoritmos del MIT utilizan conceptos directamente extraídos de la teoría matemática de juegos, principalmente el «egoísmo» (comportamiento egoísta) o el «altruismo» (comportamiento prosocial), modelados matemáticamente con valores graduales.
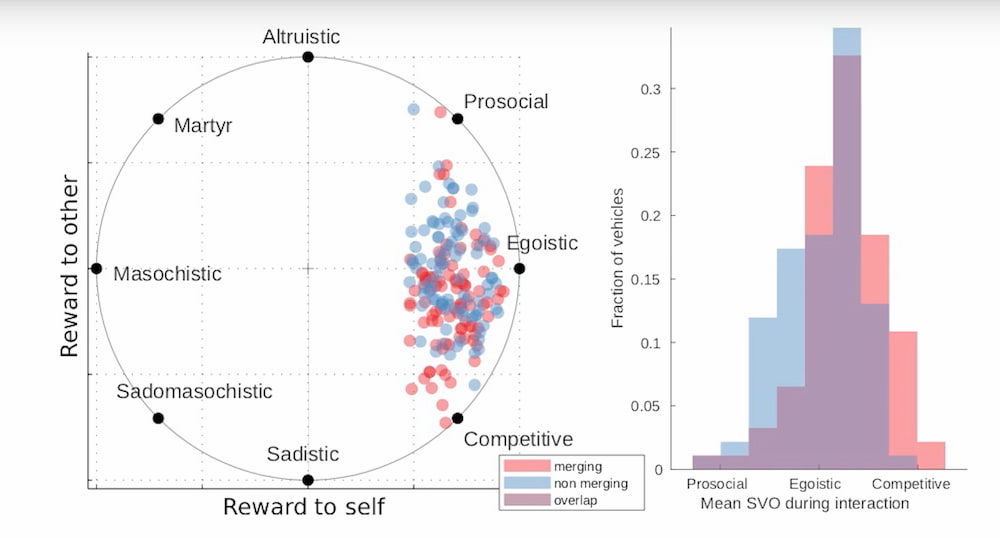
La clasificación es mucho más fina que una simple elección de tipo A o B. Internamente estos algoritmos utilizan conceptos humanos en cuadrantes que equivaldrían a lo que nosotros definiríamos como «altruista», «mártir», «masoquista», «sádico», «competitivo», «egoísta» o «prosocial». Externamente, a cada conductor se le asigna un valor de su «orientación de valores sociales» (SVO). La forma de clasificar a los conductores y obtener el SVO de cada uno es tan simple como observar su comportamiento en el tráfico real: en la forma de incorporarse a las autopistas, de facilitar dichas incorporaciones a otros, al permitir girar en cruces de forma amable (o no), etcétera.
Según cuentan los investigadores estos algoritmos parecen mejorar un 25% las predicciones habituales, al menos en el caso de las incorporaciones y cruces que es por donde han empezado a investigar. En otras palabras: por cómo se comportan los coches un algoritmo puede «adivinar» qué tipo de conducción mostrará en los momentos críticos, algo así como lo que hacemos mentalmente al sopesar al resto de conductores por su comportamiento a través de los retrovisores o al ver sus movimientos, los cambios de carril, las distancias de seguridad que guardan, etcétera.
Esto podría tener al menos dos aplicaciones en el futuro. La primera, servir como sistema de asistencia y aviso para los vehículos conducidos por personas, alertando sobre qué tipo de comportamiento (agresivo, tranquilo…) se puede esperar de un coche que, por ejemplo, venga por detrás o entre en un punto ciego lateral. La segunda aplicación serían los vehículos del futuro, que podrían –incorporando estas ideas– comportarse de forma visible y con la sutileza de sus movimientos como vehículos más altruistas y de comportamiento amable y prosocial.


