
En uno de los capítulos de la legendaria serie de policías The Wire, la detective Kima (Sonja Sohn) recibe el encargo de hacer un seguimiento a un sospechoso que se mueve por toda la ciudad. La complicación que supone seguir sigilosamente a alguien por las calles de Baltimore es grande, así que los veteranos le dan un consejo: «No vayas directamente tras de él. Usa la ciudad: sus espejos, reflejos, sombras». A continuación los espectadores vemos una magistral secuencia de varios planos en los que la detective cumple con la tarea mirando los reflejos y sombras en los escaparates, la pintura metálica de los coches, los retrovisores y cualquier otro objeto donde haya una imagen, sombra o superficie reflectante.
Y es que aunque los viandantes no seamos muchas veces conscientes, el mundo está lleno de esos reflejos y sombras: los percibimos de forma casi subconsciente, y pueden ser mucho más útiles si logramos que las máquinas sean conscientes de ellos. Eso han debido de pensar los investigadores del MIT que han trabajado en la ShadowCam, una especie de «cámara de sombras» con el objetivo de mejorar la seguridad de los vehículos que circulan por la ciudad. Es capaz de detectar «objetos invisibles»: aquellos que están ocultos tras otros objetos o detrás de las esquinas. Gracias precisamente a las sombras y reflejos.
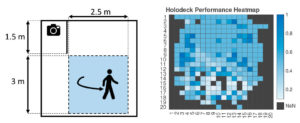 La ShadowCam es el nombre coloquial para lo que llaman un «sistema de detección en tiempo real de objetos en movimientos tras las esquinas». En las pruebas han usado desde una silla robótica motorizada a un pequeño prototipo de coche autónomo, equipados con una simple cámara. A diferencia de otras tecnologías, como el LiDAR, la cámara examina la imagen de la escena, pero fijándose no tanto en los objetos como en las superficies, por ejemplo las del suelo. Los detalles a tener en cuenta son la presencia de sombras, cambios de iluminación e incluso se amplifica el color en busca de patrones. En el proceso de «entrenamiento» se graban imágenes del suelo haciendo pasar objetos tras una esquina cercana, objetos de diferentes formas, colores y texturas.
La ShadowCam es el nombre coloquial para lo que llaman un «sistema de detección en tiempo real de objetos en movimientos tras las esquinas». En las pruebas han usado desde una silla robótica motorizada a un pequeño prototipo de coche autónomo, equipados con una simple cámara. A diferencia de otras tecnologías, como el LiDAR, la cámara examina la imagen de la escena, pero fijándose no tanto en los objetos como en las superficies, por ejemplo las del suelo. Los detalles a tener en cuenta son la presencia de sombras, cambios de iluminación e incluso se amplifica el color en busca de patrones. En el proceso de «entrenamiento» se graban imágenes del suelo haciendo pasar objetos tras una esquina cercana, objetos de diferentes formas, colores y texturas.
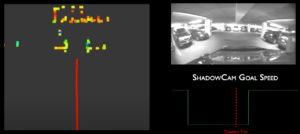 Los resultados son prometedores, con un sistema que no sólo es capaz de anticipar la presencia de objetos fuera de la línea de visión sino además de clasificarlos como estáticos o dinámicos. En las simulaciones en laboratorio se obtuvo un 80% de precisión y una vez montado el sistema sobre la silla motorizada y el coche de pruebas, del 70%. Cuando los vehículos están en movimiento y anticipan la presencia de objetos ocultos simplemente se detienen, como harían otros sistemas de seguridad en la conducción. Una forma ingeniosa de «ver detrás de las esquinas» parecida a como haría un detective en un seguimiento.
Los resultados son prometedores, con un sistema que no sólo es capaz de anticipar la presencia de objetos fuera de la línea de visión sino además de clasificarlos como estáticos o dinámicos. En las simulaciones en laboratorio se obtuvo un 80% de precisión y una vez montado el sistema sobre la silla motorizada y el coche de pruebas, del 70%. Cuando los vehículos están en movimiento y anticipan la presencia de objetos ocultos simplemente se detienen, como harían otros sistemas de seguridad en la conducción. Una forma ingeniosa de «ver detrás de las esquinas» parecida a como haría un detective en un seguimiento.



Muchas gracias me resulto de mucha utilidad.
Me gustaría solicitar su estudio en relación a contar con herramientas visuales que permitan detectar peatones en tránsito sobre todo peatones de baja altura. Asimismo, me gustaría solicitarles efectuar un estudio de como los conductores de vehículos podemos detectar la presencia de bicicletas a velocidad en veredas o calles con obstáculos visuales.
Gracias nuevamente
Ricardo Pérez Rojas
email.: patagondelsur@gmail.com