
Cuando estamos inmersos en los mundos de la realidad virtual, gracias a las gafas y auriculares que nos proporcionan imágenes y sonidos simulados, la sensación es bastante convincente. Pero como no todos los sentidos son igual de fáciles de satisfacer que la vista y el oído, hay que seguir avanzando. ¿Cómo podría hacerse para «tocar» cosas en un entorno simulado?
Cathy Fang es una ingeniera y diseñadora de sistemas de interacción que ha creado junto con su equipo un prototipo de interfaz háptica que permite engañar a las manos y el tacto para que crean que están tocando objetos reales. Se llama Wireality (cables + realidad) y en cierto modo es como las vibraciones hápticas de las pantallas de los teléfonos móviles, que simulan la sensación de una pulsación, pero a mayor escala.
El funcionamiento del sistema es fácil de entender, a simple vista, porque es una especie de «vuelta a lo básico»: los dedos y manos se mueven de forma limitada porque están atados al cuerpo mediante unos cables. Lo interesante es que cuando la persona está equipada con sus gafas de realidad virtual, esos cables se tensan lo justo y necesario para simular la sensación de tacto. Uno de los cables va a la muñeca, otro a la palma y el resto a los dedos.
 A simple vista la fórmula parece sencilla, pero requiere de muchos cálculos para afinar cuándo y cuánto se han de tensar o soltar los cables de cada dedo. Básicamente han de crear unas «manos simuladas» y calcular la distancia a los objetos virtuales (por ejemplo, una pared) para tensar el cable y detener los dedos cuando se supone que estarían tocándola. Si se continúa con el movimiento, se tensaría más la palma y la muñeca. En todo momento ha de calcular la geometría de los puntos de la mano y los lugares de contacto.
A simple vista la fórmula parece sencilla, pero requiere de muchos cálculos para afinar cuándo y cuánto se han de tensar o soltar los cables de cada dedo. Básicamente han de crear unas «manos simuladas» y calcular la distancia a los objetos virtuales (por ejemplo, una pared) para tensar el cable y detener los dedos cuando se supone que estarían tocándola. Si se continúa con el movimiento, se tensaría más la palma y la muñeca. En todo momento ha de calcular la geometría de los puntos de la mano y los lugares de contacto.
Las primeras versiones del invento eran un tanto toscas, pero las últimas funcionan de manera más refinada y pueden actuar con más velocidad y precisión, lo que le da más realismo. También pueden calcular geometrías como las de una palanca o un asidero, formas geométricas 3D más complejas y detalladas con las que se puede interactuar, aunque sean irregulares.
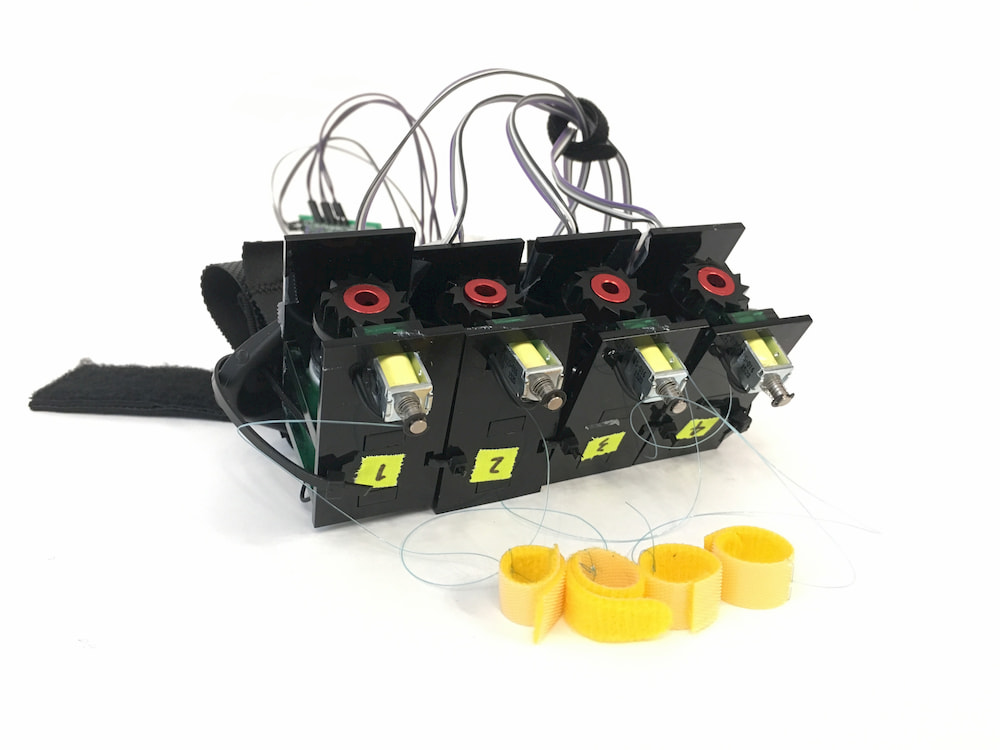
El invento también cumple con otros objetivos que Fang y su equipo se plantearon desde el principio: que fuera ligero, que no consumiera demasiada energía (los motores no actúan una vez los cables están tensados) y que los componentes fueran baratos. El hardware no utiliza piezas demasiado raras ni difíciles de conseguir, básicamente motores, cables metálicos y velcro. Además cuentan que tras utilizarlo en diversos entornos virtuales han comprobado que es preciso, rápido, resistente y que sobre todo contribuye a mejorar la «sensación de inmersión» en la realidad virtual.


