Un equipo de investigadores de la Escuela Politécnica Federal de Zúrich, el laboratorio de inteligencia artificial KAIST e Intel trabajan en un sistema que permite enseñar a los robots a moverse por el mundo real sin apenas haberlo pisado –y sin siquiera verlo. La variante que han elegido como prototipo es un pequeño robot cuadrúpedo, del tamaño de un perro, que puede mover sus cuatro patas de forma independiente. El trabajo lo han documentado titulándolo locomoción cuadrúpeda en terrenos complejos. A diferencia de otros métodos, este pequeño robot no necesita cámaras, ni rádar, ni lidar ni nada parecido para moverse a sus anchas.
La idea principal es olvidarse de la dificultad de crear sistemas de movimiento complejos y precisos para encontrar una forma robusta y adaptable que haga frente a las imperfecciones del mundo real. La fórmula para desarrollar esta «locomoción robusta» es crear un modelo matemático del robot en un simulador, ponerlo a andar sobre diferentes escenarios, permitirle hacer miles y miles de intentos de movimiento en cada uno de ellos y elegir los que funcionen.
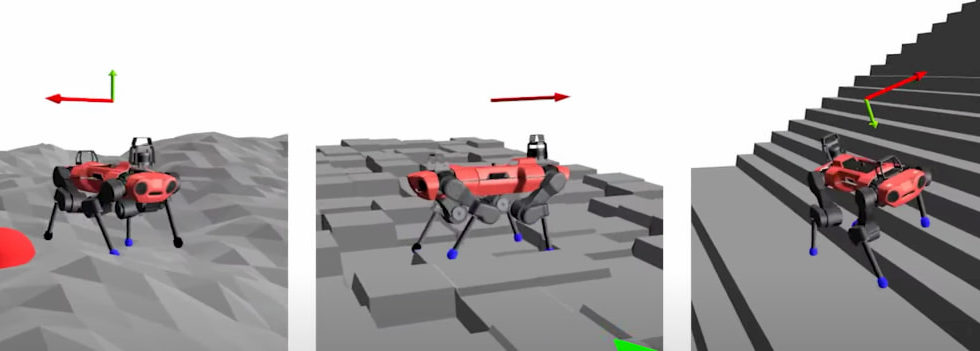
Para ello se crea una réplica o «gemelo digital» del robot y una serie de escenarios al azar que simulan posibles condiciones con las que se puede encontrar. Esto se hace con un generador de terrenos aleatorio, en cuyas diferentes zonas se asignan coeficientes de rozamiento también aleatorios, que simulan imperfecciones y obstáculos. El resultado son terrenos parecidos al campo con piedras, la nieve o unas escaleras.
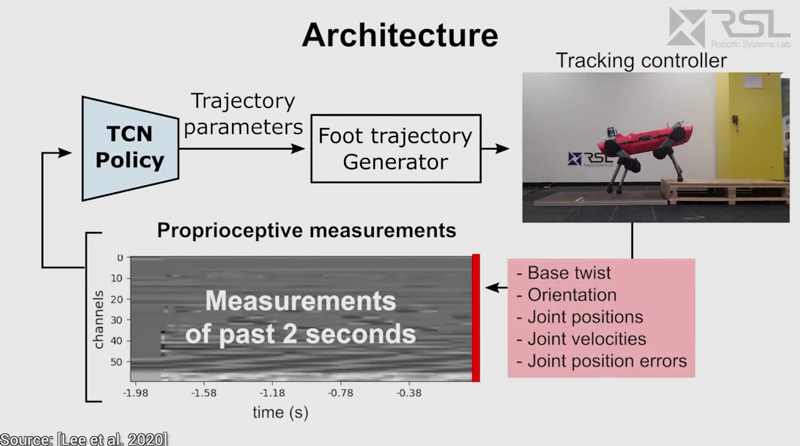
El entrenamiento se realiza virtualmente y es una especie de círculo virtuoso: primero se generan unos parámetros para la trayectoria que se quiere realizar (por ejemplo, moverse hacia adelante); esto se convierte en un «generador de trayectorias» para cada una de las patas, que se envían a la unidad controladora. Comienza el movimiento y a partir de ahí se chequean varios parámetros:
- Orientación del cuerpo
- Giro del cuerpo
- Posición de las articulaciones
- Velocidad de las articulaciones
- Errores de posición
Estas mediciones se llaman propioceptivas y son similares a las que el cerebro humano realiza para conocer la posición de nuestro propio cuerpo (y la razón por la que sepamos más o menos donde está nuestra mano y podamos tocarnos la nariz aunque la estemos moviendo a oscuras). Eso sí: los datos a tener en cuenta no van más allá de los dos segundos, así que no se necesita una gran capacidad de almacenamiento. Al robot básicamente le da igual lo que sucedió «hace un rato». Con eso es suficiente para filtrarlos, saber qué ha sucedido y obrar en consecuencia. Puede que el robot se mueva hacia donde marcaba la trayectoria, puede que no. Si todo va bien, se repite; si no, se corrige y repite. Así una y otra vez.
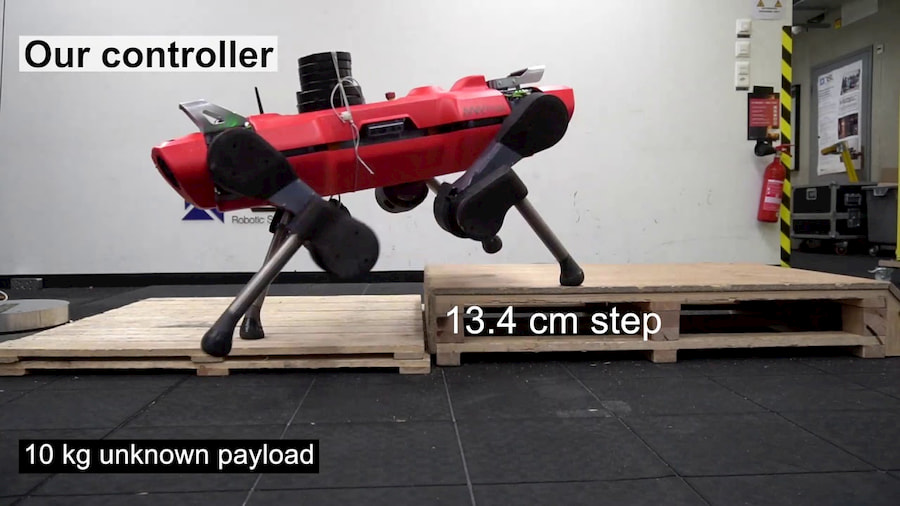
 En las pruebas puede verse cómo el robot lidia con diversas situaciones complicadas. Más allá de desplazarse o subir escaleras –cosa que estamos harto de ver en otro tipo de robots– puede moverse sobre hierba, desenredar sus patas si quedan enredadas en la maleza e incluso cruzar un río pedregoso. No tiene problema si el suelo está embarrado y resbala o si hay una fuerte pendiente resbaladiza, ni para subir ni para bajar. En otras pruebas también transporta cargas pequeñas, y puede recibir golpes y otras perturbaciones, demostrando que es capaz de adaptarse a todo tipo de situaciones.
En las pruebas puede verse cómo el robot lidia con diversas situaciones complicadas. Más allá de desplazarse o subir escaleras –cosa que estamos harto de ver en otro tipo de robots– puede moverse sobre hierba, desenredar sus patas si quedan enredadas en la maleza e incluso cruzar un río pedregoso. No tiene problema si el suelo está embarrado y resbala o si hay una fuerte pendiente resbaladiza, ni para subir ni para bajar. En otras pruebas también transporta cargas pequeñas, y puede recibir golpes y otras perturbaciones, demostrando que es capaz de adaptarse a todo tipo de situaciones.
El robot es espectacular de por sí, pero más aún lo es el método utilizado para entrenarlo: no hace falta ningún robot real, ni tampoco un escenario físico, simplemente un ordenador potente. Una vez sentadas las bases en la simulación se puede probar sin tener que fabricarlo materialmente hasta que ya está completamente «pulido» y listo; no hay que sacrificar carísimos prototipos ni gastarse un dineral en materiales, desarrollo y pruebas que salen mal. Una forma realmente ingeniosa de inventar nuevos ingenios mecánicos, sin tener que hacerlo en el «mundo real».
Últimas entradas de Microsiervos
- Un sistema de proyección dinámico que permanece siempre enfocado incluso sobre pantallas en movimiento
- Coches cayendo desde 30 metros de altura: un experimento que busca el realismo y mejorar la seguridad
- Amsterdam: la ciudad comprometida con explicar cómo funcionan sus algoritmos de inteligencia artificial


