
Cuando los coches circulen autónomos por las carreteras, serán auténticas máquinas de recibir datos, procesarlos y obtener las respuestas adecuadas a los estímulos. Los coches autónomos, en su esencia más abstracta, no son más que eso: cajas negras que reaccionan a los estímulos generando respuestas. Lo interesante, el cómo lo hacen, está dentro de la caja negra, un conjunto de sistemas interconectados muy complejos y rápidos, que se reparten todos los datos recogidos para ir dividiendo el problema en pedazos cada vez más pequeños, simples y manejables.
Los datos que recoge un coche autónomo tienen múltiples procedencias, tantas como los diferentes tipos de sensores con los que cuenta para percibir el entorno: el LIDAR (Laser Illuminating Detection and Ranging) es el ojo principal de los coches autónomos porque permite configurar una imagen fiel de lo que rodea al vehículo, como la carretera y sus márgenes, y muchos otros detalles importantes, pero no sirve para distinguir una botella de plástico de una piedra, al menos no en su esencia.
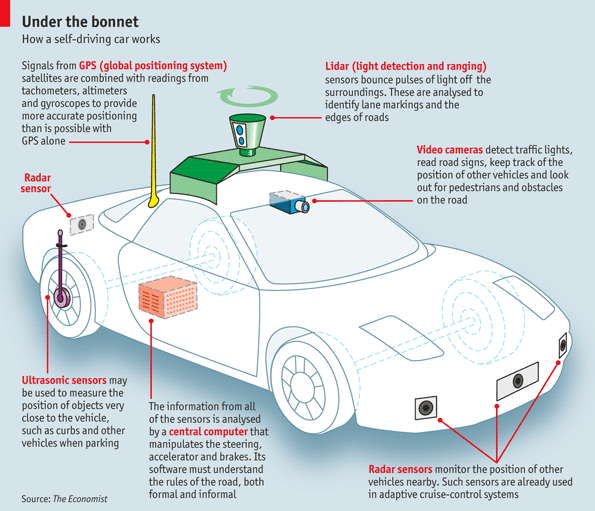 Otras fuentes de datos son las señales GPS, o las imágenes de las cámaras de vídeo en el parabrisas, o los datos del radar de proximidad en las zonas delantera y trasera del coche. No podemos olvidar otros sensores como los sensores de ultrasonidos, que se pueden utilizar para detectar los objetos pequeños situados muy cerca del coche.
Otras fuentes de datos son las señales GPS, o las imágenes de las cámaras de vídeo en el parabrisas, o los datos del radar de proximidad en las zonas delantera y trasera del coche. No podemos olvidar otros sensores como los sensores de ultrasonidos, que se pueden utilizar para detectar los objetos pequeños situados muy cerca del coche.
Toda esta información se ha de procesar, y de ese procesamiento se obtiene como resultado el movimiento del vehículo: si no pasa nada, seguimos el curso, si se detecta algo puede ser que haya que girar el volante, reducir la velocidad, acelerar, o cualquier combinación posible de actuaciones para conseguir el fin deseado. ¿Será el coche autónomo capaz de procesar bien todos los datos que consumirá mientras circula?
Hemos de tener en cuenta que los datos que alimentan al coche autónomo no proceden solo del entorno estático. Es decir, de la carretera. Los otros vehículos, los peatones, los ciclistas, e incluso los pájaros y los animales sueltos son “variables” llenas de datos que procesar. Hay que tenerlo todo en cuenta, y por eso estamos ante un problema de datos de una magnitud enorme, y que además no es nada predecible (aunque en realidad se utilizan modelos predictivos).

¿No es una locura? En parte sí, pero no olvidemos que tenemos a la tecnología de nuestra parte, y que parte de esa tecnología ya funciona desde hace tiempo. Es decir, el ESP ya procesa una gran cantidad de datos específicos para su funcionamiento (ahora ha de integrarse en el sistema global); el control de crucero adaptativo ya realiza operaciones y comprobaciones sofisticadas y nosotros tenemos el control sobre él (ahora le toca el turno al “cerebro autónomo” del coche tomar el control).
La mayor parte de los datos recibidos por un coche autónomo serán prescindibles: ruido de fondo.
Lo cierto es que de toda la información y datos que un coche autónomo puede captar (se estima alrededor de 1 GB de datos cada segundo), gran parte de ella es prescindible: no es necesario almacenarla, ni subirla a la nube. Nosotros, como conductores, lo podemos entender muy bien sin más que pensar en un trayecto cotidiano. ¿Podemos recordar cada detalle del camino recorrido? ¿Cuántas farolas pasamos, cuántos pájaros se cruzaron en nuestro camino y el número exacto de ventanas abiertas en los edificios?
En el caso del coche conectado y autónomo, pasa lo mismo. Esto, además, nos lleva a otro interesantísimo asunto, que es el de filtrar y almacenar los datos relevantes de verdad para la operación de los coches autónomos, y este tema de nuevo nos lleva a otro: ¿qué sucede si dejamos solo a un coche autónomo en un lugar para el que no dispone de mapas? La respuesta es que el coche no sabrá qué hacer si no dispone de cierta información previa, y en forma de mapas que entienda.
Por ejemplo, el coche autónomo de Google puede operar en una zona amplia porque está cartografiada y el propio vehículo recibe cantidades enormes de datos ya procesados, además de los nuevos datos que obtiene del entorno en tiempo real. Estaríamos hablando de dos fuentes principales de datos: los tomados en tiempo real mientras circulamos, y los “predefinidos” en el mapa cartografiado. La idea es que este mapa evolucione a partir de los sucesivos aprendizajes del coche, y que de esta manera partan “sobre seguro” cuando circulen por zonas conocidas.
Vía | Dataconomy


