
Todavía quedan algunos años para que ver coches con sistemas de ayuda a la conducción por las ciudades sea algo habitual, y muchos más para que sean «mayoría» en el tráfico rodado, pero los expertos ya están identificando algunos de los retos a los que de forma concreta hay que encontrar soluciones. Por esto en Visual Capitalist hicieron un resumen infográfico a partir de datos de diversos fabricantes de automóviles, la Comisión Europea, informaciones publicadas en la BBC y The Telegraph y también en revistas tecnológicas y científicas como Wired, New Scientist y MIT Technology Review.
La clave del asunto es que hay muchos aspectos en los que los coches con sistemas de asistencia a la conducción todavía «deben mejorar», siendo esto algo que varía entre lo deseable (que conduzcan mejor con lluvia) y lo obligatorio (que eviten un mayor número de accidentes). En la lista están, por ejemplo:
– Mejorar la conducción con sistemas de asistencia al conductor bajo condiciones medioambientales. Conducir de día y con unas condiciones de visibilidad óptima es, sin duda, lo más fácil y deseable, pero el mundo real no es así: en muchos lugares hay interminables días de lluvia, hielo en invierno o niebla. Problemas como poder ver los carriles si la calzada está cubierta de nieve son situaciones concretas a superar. La utilización de cámaras infrarrojas, además de cámaras convencionales, permite resolver parte de estas situaciones, incluyendo los deslumbramientos, la visión en túneles y los cambios bruscos de luz. Según calculan los expertos en 3-4 años estos problemas podrían estar resueltos.
– Adaptar las leyes y normativas. Este es uno de los aspectos que más fácilmente puede resolverse, en uno o dos años; básicamente consiste en adaptar los permisos y normas de circulación de este tipo de vehículos a partir de datos que sean estadísticamente significativos: «accidentes por miles de kilómetros recorridos» y similares. Quizás, al principio, los coches y camiones autónomos no puedan sino transportar cajas y otros materiales, pero no personas. Al menos sería un comienzo.
– Cuestión de precio. Que los vehículos con sistemas de asistencia a la conducción triunfen o no será finalmente cuestión de precio. Hoy, toda la tecnología que añaden los hacen unos 10.000 euros más caros que un coche convencional, pero en un par de décadas, hacia 2035, se calcula que estos sistemas podrían suponer tan solo unos 2.000 o 2.500 euros extras. Este es quizá el factor más difícil de calcular, pues puede depender de la demanda, de la percepción de seguridad que proporcionen y de los costes colaterales (seguros, mantenimiento, etcétera) que pueden disminuir drásticamente.
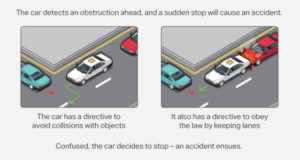
– Problemas de interacción. Esta categoría es la más compleja y sobre la que no está claro cuándo se logrará una solución satisfactoria. Incluye problemas tales que los coches sean capaces de reconocer a las personas y sus gestos (por ejemplo a un peatón o un policía que indica que frenemos porque más adelante se ha producido un accidente), a los animales que pueden aparecer en la calzada y otros imprevistos. También se incluyen las cuestiones éticas, como el famoso «dilema del tranvía» que adaptado al mundo real significaría dejar en manos del coche decidir si es mejor parar para no atropellar a una persona (y quizá colisionar con el coche que viene detrás) o continuar su camino (evitando la colisión por alcance aunque no se pueda evitar atropellar al peatón). Finalmente están todo tipo de situaciones conflictivas que requieren de una decisión «inteligente», como las que obligan a los coches a respetar las normas de tráfico, por ejemplo, «no salirse del carril» pero a la vez «evitar las colisiones», que pueden generar situaciones contradictorias.
Algunos lectores pensarán que muchos de estos retos de interacción son los mismos a los que se enfrentan actualmente los robots y las inteligencias artificiales –y no estarían muy desencaminados. E incluso es común pensar que pudiera bastar algo como las «tres leyes de la robótica» de Isaac Asimov para resolver esas situaciones. Pero nada más lejos de la realidad: las leyes de la robótica de Asimov no funcionan ni funcionarán nunca en el mundo real. Son leyes de ficción, que pasan por alto el «problema de definición filosófica» de términos tales como «hacer daño», «causar» u «obedecer». Menos mal que hasta que lleguemos a ese gran reto habremos podido ir resolviendo otros más sencillos y menos humanos.


