Manipular objetos con destreza es mucho más difícil de lo que parece. Para nosotros los humanos tareas tan simples como agarrar un objeto y girarlo con la mano y los dedos son prácticamente triviales, porque aprendemos en los primeros meses de vida a tocar, agarrar y mover objetos. Y aunque encajar llaves, desatornillar piezas o manejar una raqueta para golpear una bola a toda velocidad nos resulte cotidiano, para los robots es infinitamente más complicado.
Pero los mecanismos robóticos dotados de brazos y manos avanzan a pasos agigantados: tienen más dedos, articulaciones y grados de libertad de movimientos. Gracias a sus motores pueden realizar movimientos delicados y mediante los sensores calcular qué presión pueden ejercer para trabajar, incluso con los más delicados objetos. Sin embargo, el cómo manipular esos objetos para orientarlos en el espacio no es tan evidente; ni siquiera en algo tan obvio como evitar que se caigan al suelo si no están firmemente agarrados.
Ahora unos jóvenes investigadores del CSAIL (Laboratorio de Inteligencia Artificial e Informática) del MIT han visto reconocido su esfuerzo por parte de la Conferencia de Aprendizaje Robótico 2021 con un trabajo sobre un sistema para manipular y orientar objetos en general con una mano robótica.
En su trabajo utilizaron 2.000 objetos diferentes y una mano robótica simulada, una «gemela digital» que se emplea en simulaciones. La mano en cuestión tiene 24 grados de libertad y el aspecto de una mano humana, puede girarse de múltiples formas y el entorno respeta las leyes de la física (distancias, fuerzas, gravedad…), resultando así mucho más barato que un desarrollo con piezas mecánicas. Hemos visto manos robóticas como esa funcionando en el mundo real y haciendo auténticas proezas como resolver cubos de Rubik y otras tareas complicadas.
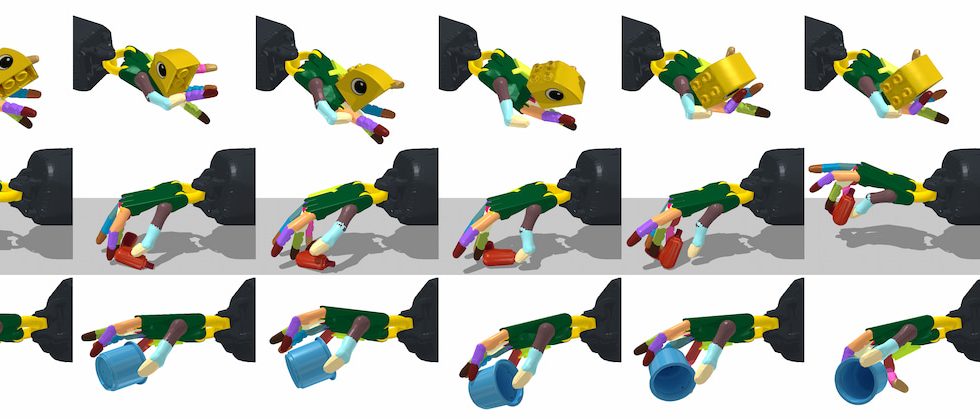
Hay básicamente tres formas de manipular objetos con esa mano robótica: con el objeto sobre la mesa, con el objeto en el aire debajo de la mano (colgando de los dedos) o encima de la mano. La tarea que debe aprender el robot es a manipular el objeto para situarlo con la orientación deseada; en el primero de los casos el objeto descansa sobre la mesa y los dedos pueden agarrarlo y girarlo, en los otros dos se hace sujetándolo para que no se caiga o sobre la palma de la mano. Los robots más básicos, en cambio, sólo pueden hacer un movimiento de pinza/garra o ventosa, dependiendo del mecanismo que utilicen, que suele ser bastante tosco.
Es el delicado movimiento de los dedos, de forma coordinada, el que permite colocar el objeto en la posición deseada. Pero, ¿cómo se consigue que la mano aprenda a manipular los objetos con destreza? El algoritmo utilizado es el denominado entrenamiento «profesor-estudiante» combinado con el aprendizaje profundo de la inteligencia artificial. En el entrenamiento se definen cuestiones como qué movimientos puede hacer la mano, qué aspecto tendrán las imágenes, qué datos de «pose» definen el objeto y cómo leer el «posicionamiento» de las articulaciones. A los estudiantes se les ocurrió, con gran intuición, utilizar previamente una versión en «gravedad cero» para que la tarea resultara más fácil, añadiendo luego la fuerza de la gravedad.
La parte del aprendizaje profundo comienza cuando se utilizan esos parámetros para observar cómo cambia la posición del objeto a medida que se realizan movimientos; si las imágenes y pose son más parecidas al objetivo (la posición a la que se quiere llegar), esas líneas quedan reforzadas; de lo contrario no se consideran tan importantes. Y se repite una y otra vez. Cuando la mano robótica ha aprendido a manipular un objeto se prueba con el siguiente, con otro… y así hasta los dos mil que hay en la colección. Lo mejor es que al tratarse de una simulación se pueden hacer los cálculos en tiempo récord, dependiendo de la potencia de cálculo.
Este método que han documentado funciona estupendamente para cualquier nuevo objeto incluso aunque no sea conocido, básicamente porque todos los pequeños objetos se parecen unos a otros y comparten algunas características comunes. También sirve para cualquiera de las tres formas de manejarlos (sobre la mesa, la palma o colgándolo de los dedos) que es algo que también sucede en el mundo real respecto a cómo los humanos manipulamos los objetos a diario. Los mayores problemas surgen cuando se introducen objetos muy diferentes (una cuchara, un martillo, una taza con asa) en cuyo caso el porcentaje de éxito disminuye notablemente.
Lo interesante de trabajos como este es ver cómo la tecnología avanza considerando ciertos paralelismos con el mundo real, utilizando simulaciones y separando el problema por partes (aprender, practicar). Estupendas opciones para comprobar si las ideas funcionan antes de pasar al taller a fabricar.
Últimas entradas de Microsiervos
- La nueva «biología digital» utiliza la IA para descubrir nuevos fármacos y los mecanismos de la vida
- Una solución azucarada para alargar la vida de las baterías eléctricas de los vehículos
- Un ambicioso plan en Australia para aprovechar la energía solar del desierto y enviarla al sudéste asíatico por cable


