
Cuando pensamos en robots solemos traer a la mente dispositivos metálicos con forma humana, como los androides, o que recuerdan a miembros del cuerpo humano, como los brazos o manos robóticas, rígidos y resistentes. Pero más allá de esta primera idea hay mucho más. De hecho diversos grupos trabajan en la investigación de otro tipo de robots: los que podríamos llamar «robots blanditos» que se inspiran en diversos seres vivos pero se comportan como los robots tradicionales.
Estos mecanismos robóticos «blanditos» tienen ya y tendrán su lugar en fábricas, vehículos, en la exploración de otros planetas o incluso como complementos para los seres humanos: exoesqueletos, músculos robóticos y dispositivos de ayuda al movimiento. Por sus características pueden realizar movimientos que un robot convencional digamos «completamente sólido» encontraría difícil, tal y como pasar a través de sitios estrechos, mover una manguera, adaptar su forma para agarrar objetos con más delicadeza o incluso entrar dentro del cuerpo humano (nanobots).
En el Instituto Wyss de Harvard diversos equipos llevan años trabajando en todas estas ideas, partiendo de un concepto principal: en la naturaleza los materiales blandos son mucho más comunes que los duros, así que alguna ventaja tendrán. Es cierto que en los animales encontramos huesos, uñas, cuernos o caparazones, pero esos materiales son minoría frente a los tejidos adiposos, músculos, pelos y piel. Los materiales blandos, flexibles y elásticos triunfan allí donde otros no pueden hacerlo. Por eso los investigadores examinan en profundidad todas sus posibilidades y aplicaciones.
En el Instituto Wyss han creado robots de diversos tipos, entre ellos:
 Pequeños animales robóticos «blanditos», como pulpos y cucarachas, que se mueven encogiéndose y estirándose.
Pequeños animales robóticos «blanditos», como pulpos y cucarachas, que se mueven encogiéndose y estirándose.- Guantes robóticos para rehabilitación.
- Exoesqueletos para ayudar en los movimientos a personas con limitaciones.
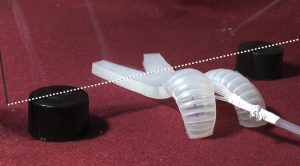
- Sensores flexibles rellenos de líquido, que resisten movimientos bruscos.
- Plantillas con retroalimentación para mejorar la forma de caminar.
Además de esto también examinan a la madre naturaleza en busca de ideas útiles para mejorar el funcionamiento de los robots y la vida de las personas: cómo se organizan las colonias de insectos, cómo se desarrollan los enjambres, qué nanomateriales pueden ser importantes para conectar las células del cuerpo humano con diversos componentes tecnológicos… La lista es larga.
Entre sus inventos más recientes está un sistema flexible de ayuda al caminar, que se ajusta a la cadera y mediante unos motores puede proporcionar soporte y algo de fuerza extra a las piernas a la hora de subir escaleras o realizar ciertos movimientos, mejorando la movilidad. Es una versión nueva de otro invento similar que presentaron hace años (más grande y pesado) que mejoraba la movilidad de las extremidades inferiores. También han mostrado un guante robótico con el que las personas que se han visto afectadas por infartos cerebrales pueden realizar ejercicios de rehabilitación sin la necesidad obligatoria de los ejercicios con un terapeuta, para recuperar la movilidad en menos tiempo. Ambos emplean tecnología flexible que se adapta al cuerpo humano sin problema.
Muchos de estos robots aprovechan los conocimientos que se extraen de otros hermanos robóticos, especialmente durante las pruebas y entrenamiento de los algoritmos. Primero se mide cuidadosamente cómo se realizan las acciones (por ejemplo: caminar, correr o agarrar objetos) para luego marcarlas como objetivos para los diversos mecanismos. Aunque los robots «blanditos» tengan una base de funcionamiento diferente de los tradicionales, el feedback que proporcionan los sensores permite evaluar con precisión la posición para hacer que se puedan recrear los movimientos deseados. Cómo aplicarlos es entonces cuestión simplemente de imaginación.


