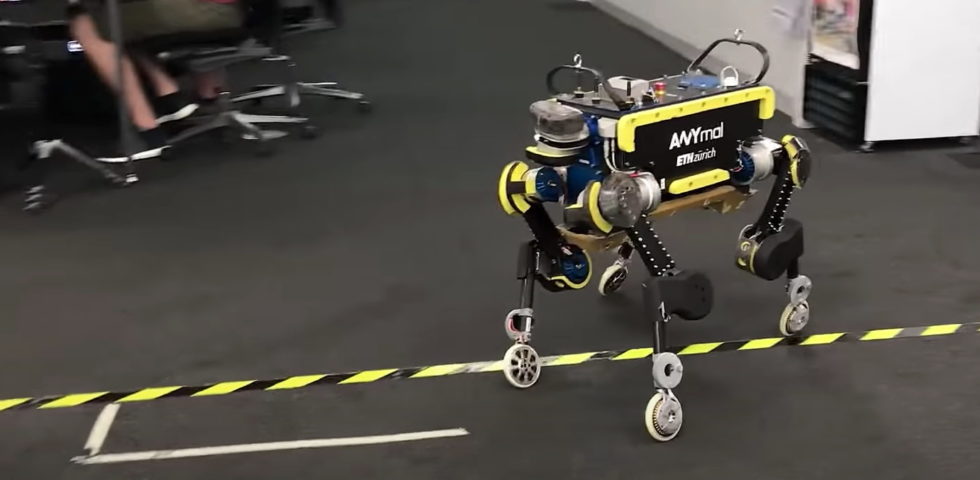
¿Es mejor caminar a cuatro patas o desplazarse mediante ruedas? ¿Depende del terreno? Y, si las ruedas son tan eficientes, ¿por qué no hay animales con ruedas? Ahora un robot llamado ANYmal, surgido del Laboratorio de Sistemas Robóticos de la ETH Zurich (Suiza) y la empresa ANYbotics está explorando un sistema de locomoción híbrido que combina lo mejor de ambas cosas. Verlo en acción es como disfrutar de la danza de una patinadora por su elegancia y efectividad.
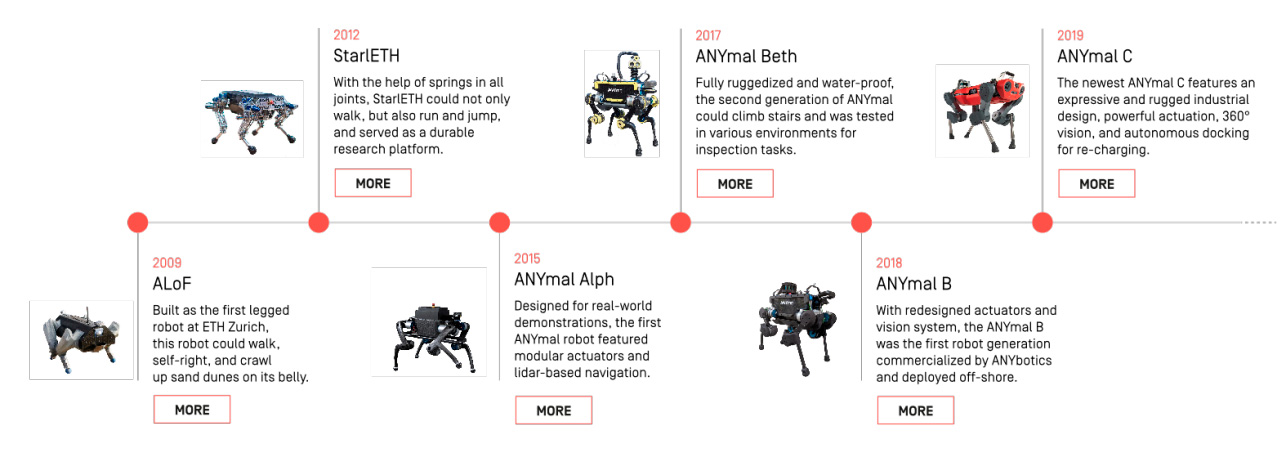
El robot nació originalmente en 2009 como un pequeño robot cuadrúpedo, del tamaño del perro. Sus creadores le enseñaron a caminar moviendo las patas mediante las tecnologías habituales de inteligencia artificial: clones digitales, aprendizaje automático y demás. Año tras año fue añadiendo habilidades: saltar, subir escaleras e incluso recargarse automáticamente volviendo a su base. Utilizaba principalmente cámaras de vídeo y LIDAR, el escáner láser para medir distancias como el que utilizan muchos automóviles.
Pero esta versión con ruedas de ANYmal parte de una idea diferente: no hay cámaras ni LIDAR. Todos los movimientos se aprenden mediante los sensores que están conectados a las ruedas y técnicas de inteligencia artificial. Mediante un giróscopo y otros sensores en sus articulaciones puede realizar mediciones propioceptivas y conocer cuál es exactamente la posición de su cuerpo («torso»). De este modo puede corregir con rapidez moviendo las extremidades y compensar cualquier desequilibrio. Esto se ha usado ya con éxito para muchos robots que caminan.
 La novedad es la incorporación de las ruedas, un método de locomoción que resulta increíblemente eficiente en aspectos como el ahorro de energía. Dado que no existen en la naturaleza animales con ruedas, poco se puede aprender de esto; tan sólo está lo que sabemos de coches, motos, bicicletas y seres humanos con patines. En el caso de la versión con ruedas de ANYmal el método de aprendizaje es similar y básicamente «ciego»: tan sólo necesita saber cómo está orientado el cuerpo, a dónde quiere ir y elegir entre activar los motores o frenos de las ruedas o bien articular las patas para caminar. Hay versiones con ruedas pasivas y activas (motorizadas).
La novedad es la incorporación de las ruedas, un método de locomoción que resulta increíblemente eficiente en aspectos como el ahorro de energía. Dado que no existen en la naturaleza animales con ruedas, poco se puede aprender de esto; tan sólo está lo que sabemos de coches, motos, bicicletas y seres humanos con patines. En el caso de la versión con ruedas de ANYmal el método de aprendizaje es similar y básicamente «ciego»: tan sólo necesita saber cómo está orientado el cuerpo, a dónde quiere ir y elegir entre activar los motores o frenos de las ruedas o bien articular las patas para caminar. Hay versiones con ruedas pasivas y activas (motorizadas).
Cada pata del robot se comporta de hecho de forma independiente, pudiendo activarse o desactivarse en cualquiera de los dos modos (rodar o rígida) cuando se considere necesario y sea seguro, para evitar tropezar o caer. Curiosamente las ruedas no tienen capacidad de giro en sí mismas; los movimientos de giros laterales mientras está rodando se obtienen modificando las velocidades y la posición de las patas.
 Esta eficiencia permite al ANYmal de cuatro patas con ruedas consumir mucha menos energía –un recurso siempre escaso en robótica– y alcanzar velocidades sorprendentes, de hasta 4 metros por segundo. Cuando es necesario, por ejemplo, al subir o bajar una escalera o un bordillo, simplemente bloquea las ruedas para caminar a cuatro patas con mayor seguridad.
Esta eficiencia permite al ANYmal de cuatro patas con ruedas consumir mucha menos energía –un recurso siempre escaso en robótica– y alcanzar velocidades sorprendentes, de hasta 4 metros por segundo. Cuando es necesario, por ejemplo, al subir o bajar una escalera o un bordillo, simplemente bloquea las ruedas para caminar a cuatro patas con mayor seguridad.
Está por ver si, además del uso de la propiocepción, la movilidad de este curioso robot mejoraría si se añadieran cámaras para estudiar el terreno circundante, si se pudieran girar las ruedas de forma individual y algunos otros detalles. Todo esto podría ser útil para hacerlo más versátil y capaz de superar cierto tipo de obstáculos en todo tipo de terrenos.
Últimas entradas de Microsiervos
- «The Mandalorian» y cómo nuevas herramientas muestran el camino para abaratar la producción de los efectos visuales
- Cómo enseñar a un robot a caminar por todo tipo de terrenos sin haber pisado el «mundo real»
- Un sistema de proyección dinámico que permanece siempre enfocado incluso sobre pantallas en movimiento
